Морські зірки здатні пересуватися по вертикальних, горизонтальних і навіть перевернутих поверхнях без мозку та централізованої нервової системи. Міжнародна команда біологів і інженерів з’ясувала, як ці тварини координують сотні трубчастих ніжок, змінюючи спосіб руху залежно від навантаження й положення тіла. Дослідження провели в лабораторних умовах із використанням спеціального скла та додаткової ваги, а результати опублікували в Proceedings of the National Academy of Sciences. Про це повідомляє медіа про науку, технології та здоров’я КРВ.медіа з посиланням на текст дослідження.
Як морські зірки рухаються без мозку
Морські зірки, або морські зорі, давно відомі своєю здатністю пересуватися поверхнями з різними фізичними властивостями — кам’янистими, слизькими, піщаними чи навіть гладкими, як скло. При цьому вони не мають мозку в класичному розумінні та позбавлені централізованої нервової системи. Нове дослідження показує, що складна координація рухів можлива й без «керівного центру» — за рахунок децентралізованих механізмів, які реагують на фізичне навантаження в реальному часі.
Модельним організмом стала морська зірка Asterias rubens — поширений вид у північних морях. Саме на її прикладі науковці продемонстрували, що швидкість руху не має прямої залежності ані від маси тіла, ані від кількості задіяних кінцівок. Це суперечить типовим уявленням про локомоцію (рух тіла) в тваринному світі.

Трубчасті ніжки як основа децентралізованого руху
На нижньому боці кожного променя морської зірки розташовані ряди трубчастих ніжок — подій. Кожна ніжка складається з гнучкого м’язового стебла та плаского диска на кінці. Рух забезпечує водоносна судинна система: рідина нагнітається всередину стебла, змушуючи його витягуватися або скорочуватися. Для прикріплення до поверхні диск виділяє білковий клейкий слиз, який дозволяє утримуватися навіть на перевернутих поверхнях.
У Asterias rubens на кожному промені є чотири ряди таких ніжок. Загалом під час руху задіяні сотні окремих «контактних точок». Дослідження показало, що координація між ними не потребує центрального контролю: кожна ніжка змінює тривалість контакту з поверхнею залежно від механічного навантаження. Умовно кажучи, це схоже на колектив без керівника, де кожен учасник реагує на ситуацію локально, але разом система працює узгоджено.
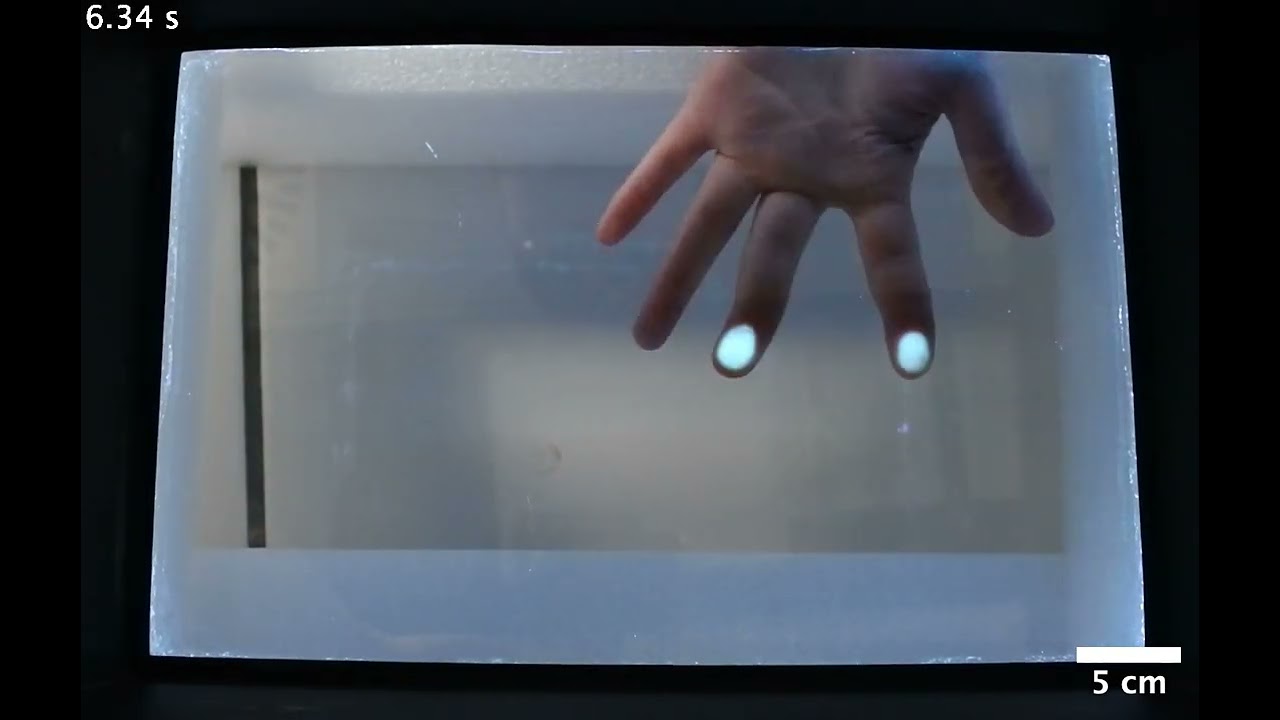
Щоб побачити, які саме ніжки контактують із поверхнею, дослідники використали спеціальне освітлене скло з високою заломлювальною здатністю. Коли ніжка торкалася скла, змінювався шлях світла, і на поверхні з’являлася яскрава точка — «відбиток кроку». Такий метод раніше застосовували для вивчення руху комах, тварин і людини, але для морських зірок його використали вперше в такому масштабі.
Результати показали: швидкість повзання залишалася майже однаковою незалежно від того, скільки ніжок одночасно торкалися поверхні. Водночас збільшення часу приклеювання кожної ніжки призводило до сповільнення руху. Це підтверджує гіпотезу, що морські зірки регулюють локомоцію не через нервові сигнали з центру, а через фізичний зворотний зв’язок.
Для перевірки цього механізму тваринам додавали спеціальні «рюкзаки» вагою 25 і 50 відсотків від маси їхнього тіла. За умов додаткового навантаження час адгезії ніжок зростав, що прямо впливало на характер руху.

Окремий блок експериментів присвятили інвертованій локомоції — руху морських зірок по «стелі» лабораторної установки. Як експериментальні спостереження, так і комп’ютерне моделювання показали, що в такому положенні трубчасті ніжки змінюють поведінку, компенсуючи вплив сили тяжіння.
Автори зазначають, що морські зірки здатні адаптуватися до різних механічних умов, змінюючи взаємодію між ніжками та субстратом. Така стратегія робить їхній рух стабільним і надійним у середовищах, де централізоване керування могло б бути менш ефективним.

Дослідження демонструє, що складна координація рухів можлива без мозку та централізованої нервової системи. Це має значення для розуміння еволюції нервових систем і показує, що ефективна поведінка може виникати з простих локальних правил.
Окрім фундаментальної науки, результати можуть бути корисними для біоінженерії та робототехніки. Йдеться не про готові технологічні рішення, а про потенційні підходи до створення роботів, здатних пересуватися складними поверхнями без складних обчислювальних центрів — за принципом децентралізованої адаптації.



